|
libfranka 0.15.3
FCI C++ API
|
Loading...
Searching...
No Matches
|
libfranka 0.15.3
FCI C++ API
|
Contains common types and functions for the examples. More...
#include <array>#include <Eigen/Core>#include <franka/control_types.h>#include <franka/duration.h>#include <franka/robot.h>#include <franka/robot_state.h>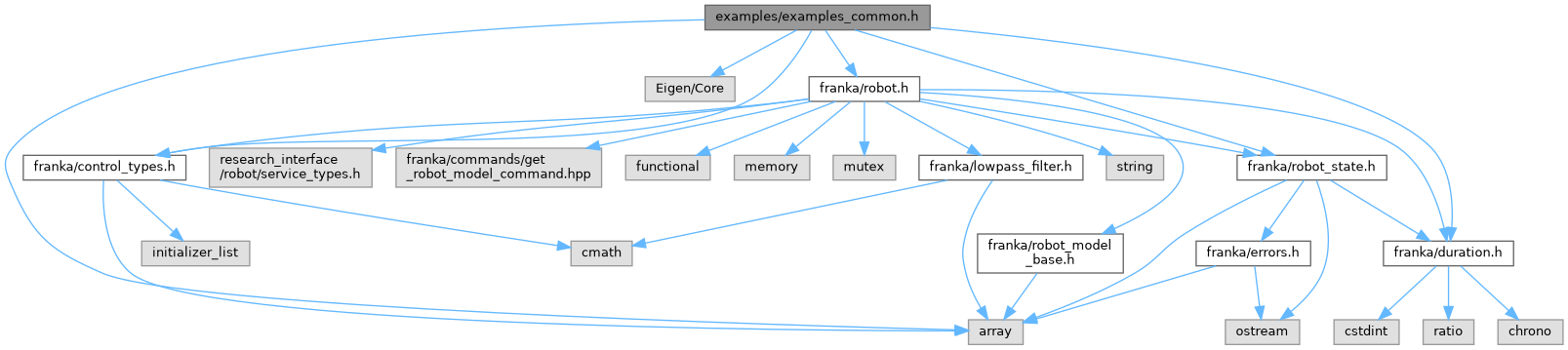
Go to the source code of this file.
Classes | |
| class | MotionGenerator |
| An example showing how to generate a joint pose motion to a goal position. More... | |
Functions | |
| void | setDefaultBehavior (franka::Robot &robot) |
| Sets a default collision behavior, joint impedance and Cartesian impedance. | |
Contains common types and functions for the examples.
| void setDefaultBehavior | ( | franka::Robot & | robot | ) |
Sets a default collision behavior, joint impedance and Cartesian impedance.
| [in] | robot | Robot instance to set behavior on. |