|
libfranka 0.16.1
FCI C++ API
|
Loading...
Searching...
No Matches
|
libfranka 0.16.1
FCI C++ API
|
Allows the user to read the state of a Robot and to send new control commands after starting a control process of a Robot. More...
#include <active_control_base.h>
Public Member Functions | |
| virtual std::pair< RobotState, Duration > | readOnce ()=0 |
| Waits for a robot state update and returns it. | |
| virtual void | writeOnce (const Torques &)=0 |
| Updates torque commands of an active control. | |
| virtual void | writeOnce (const JointPositions &, const std::optional< const Torques > &)=0 |
| Updates the joint position and torque commands of an active control. | |
| virtual void | writeOnce (const JointVelocities &, const std::optional< const Torques > &)=0 |
| Updates the joint velocity and torque commands of an active control. | |
| virtual void | writeOnce (const CartesianPose &, const std::optional< const Torques > &)=0 |
| Updates the cartesian position and torque commands of an active control. | |
| virtual void | writeOnce (const CartesianVelocities &, const std::optional< const Torques > &)=0 |
| Updates the cartesian velocity and torque commands of an active control. | |
| virtual void | writeOnce (const JointPositions &motion_generator_input)=0 |
| Updates the joint position commands of an active control, with internal controller. | |
| virtual void | writeOnce (const JointVelocities &motion_generator_input)=0 |
| Updates the joint velocity commands of an active control, with internal controller. | |
| virtual void | writeOnce (const CartesianPose &motion_generator_input)=0 |
| Updates the cartesian pose commands of an active control, with internal controller. | |
| virtual void | writeOnce (const CartesianVelocities &motion_generator_input)=0 |
| Updates the cartesian velocity commands of an active control, with internal controller. | |
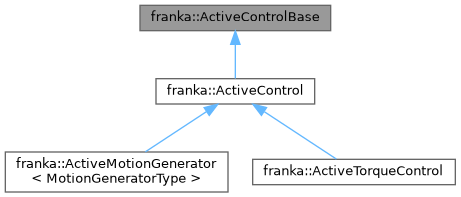
Allows the user to read the state of a Robot and to send new control commands after starting a control process of a Robot.
hint: To create an ActiveControlBase, see franka::ActiveTorqueControl or franka::ActiveMotionGenerator
|
pure virtual |
Waits for a robot state update and returns it.
| NetworkException | if the connection is lost, e.g. after a timeout. |
| ProtocolException | if robot returns an unexpected message. |
| ControlException | if robot is in an error state. |
Implemented in franka::ActiveControl.
|
pure virtual |
Updates the cartesian position and torque commands of an active control.
hint: implemented in ActiveMotionGenerator<CartesianPose>
Implemented in franka::ActiveControl.
|
pure virtual |
Updates the cartesian pose commands of an active control, with internal controller.
| motion_generator_input | the new motion generator input |
Implemented in franka::ActiveControl.
|
pure virtual |
Updates the cartesian velocity and torque commands of an active control.
hint: implemented in ActiveMotionGenerator<CartesianVelocities>
Implemented in franka::ActiveControl.
|
pure virtual |
Updates the cartesian velocity commands of an active control, with internal controller.
| motion_generator_input | the new motion generator input |
Implemented in franka::ActiveControl.
|
pure virtual |
Updates the joint position and torque commands of an active control.
hint: implemented in ActiveMotionGenerator<JointPositions>
Implemented in franka::ActiveControl.
|
pure virtual |
Updates the joint position commands of an active control, with internal controller.
| motion_generator_input | the new motion generator input |
Implemented in franka::ActiveControl.
|
pure virtual |
Updates the joint velocity and torque commands of an active control.
hint: implemented in ActiveMotionGenerator<JointVelocities>
Implemented in franka::ActiveControl.
|
pure virtual |
Updates the joint velocity commands of an active control, with internal controller.
| motion_generator_input | the new motion generator input |
Implemented in franka::ActiveControl.
|
pure virtual |
Updates torque commands of an active control.
hint: implemented in ActiveTorqueControl
Implemented in franka::ActiveControl, and franka::ActiveTorqueControl.